研究内容Research
無人航空機による利用システム
2. クラスター無人航空機による長距離位置情報伝送システム
研究概要
UAVと地上局との長距離位置情報伝達を行うことを目標としています.
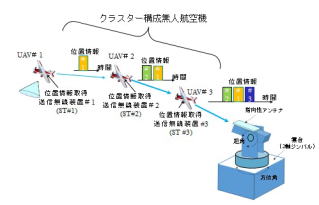
クラスター無人航空機による長距離位置情報伝送システムイメージ
※クラスター(cluster):房,群れ,集団
本研究は,JKA補助事業(オートレース補助事業)を受けて実施しています.
実験システム
1.移動局(ST)の構成は以下のように無線通信モジュールとCPUボード,慣性航法装置からなります.
2.慣性航法装置で得た位置情報はCPUボードを経て無線通信モジュールから送信されます.
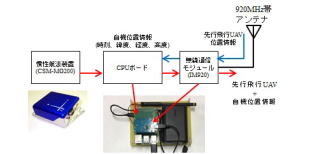
実験システムの概要
AP側の構成
基地局はWindowsPCに接続したGPS受信機で緯度,経度,時刻を取得します.
※PCの時刻はGPSと同期しておきます.
次に,無線通信モジュールでST3の電波を受信しST1~ST3それぞれの緯度,経度,高度,受信強度のデータを取得しま す.
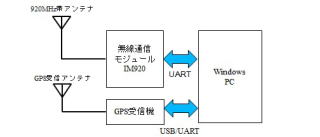
AP側の構成概要
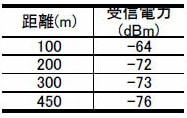
対向通信実験
一対向のIM920で,距離を変化させて通信実験を行いました.尚,通信の疎通を450mまで確認できました.

実験風景
通信距離と受信電力
チェーン状マルチホップ無線通信の研究
本課題については、以下の検討を実施しました。
・ 無線機を搭載した無人航空機を飛行させ地上との電波伝搬特性の評価
・ チェーン状マルチホップ無線通信システムについての長距離伝送に関する検討
・ メッシュネットワークの検討
無線機を搭載した無人航空機を飛行させ地上との電波伝搬特性の評価
白老滑空場において、無人航空機(小川精機㈱ O.S.SPYDER850)に無線装置(ST1)を搭載し、地上に設けたAPとの通信実験を実施しました。
実験方法
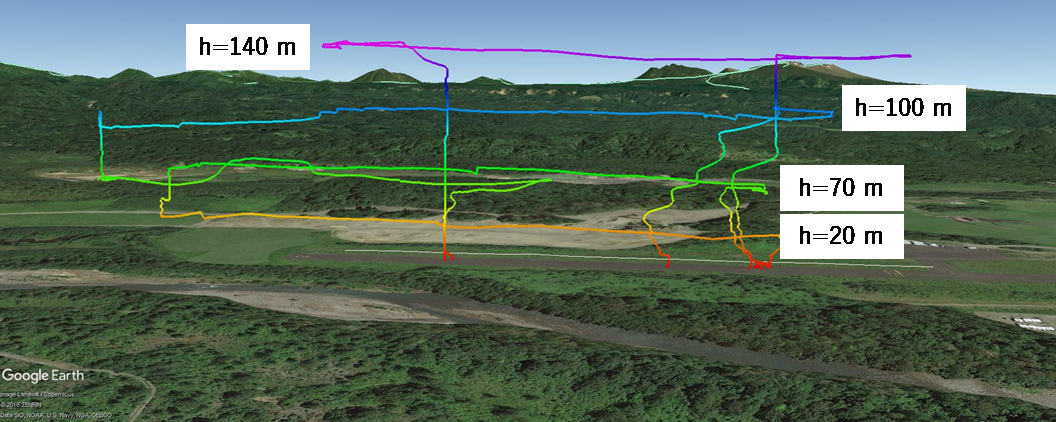
本実験では図2-1に示すように無人航空機(UAV)の下部に無線装置を搭載し、APは、フレネルゾーンを考慮し地上6 mの高さに設置しました。STの送信出力は10
dBmに設定し、APからの水平距離150 m〜500 m間を高度h
= 20 m~140 mで飛行させ、APでの受信電力を取得しました。図2-2は、UAVに搭載したGPS受信機で得た飛行軌跡をGoogle Earthにプロットしたものです。

図2-1 無線機の設置状況
実験結果
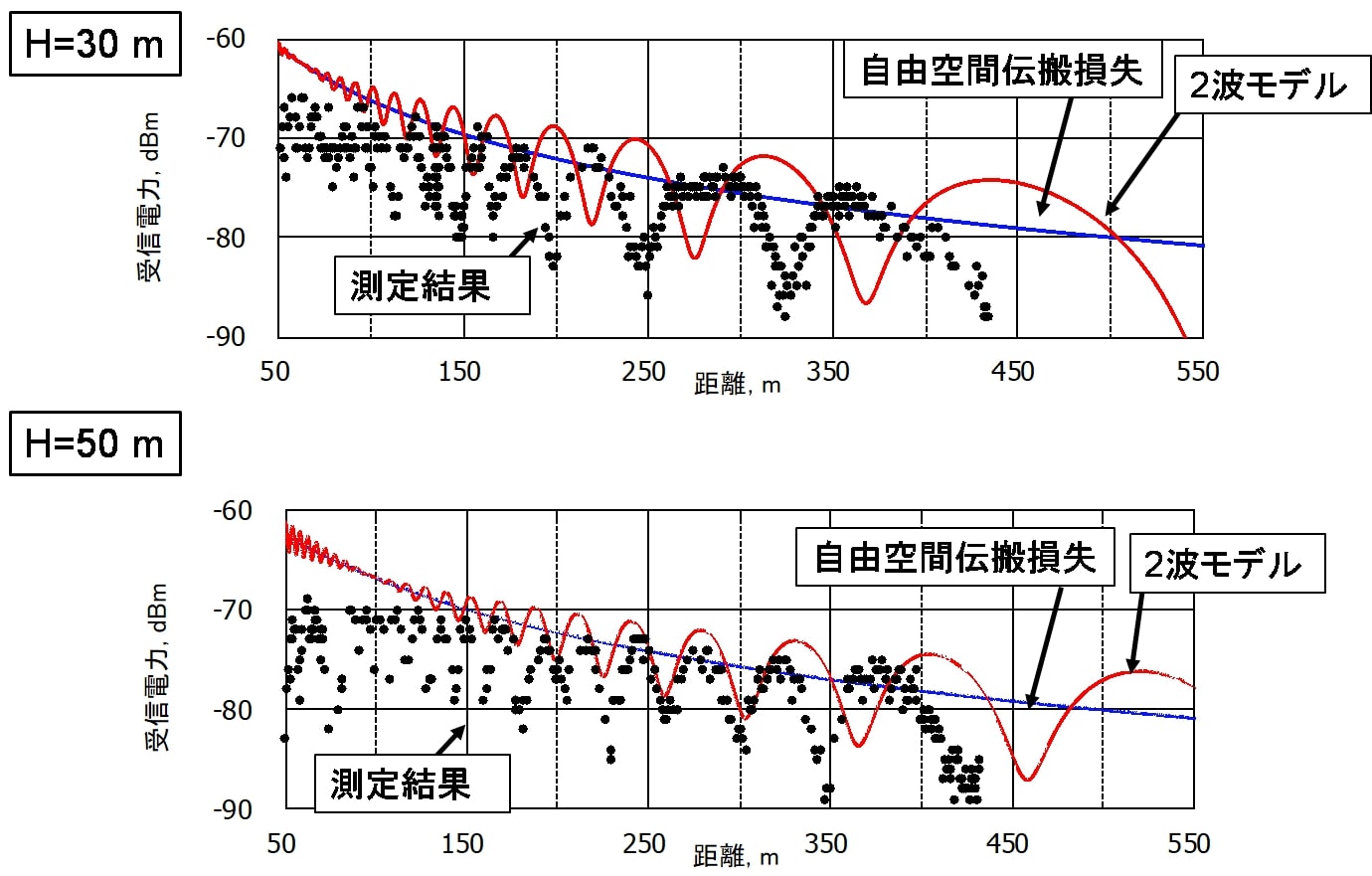
滑走路脇の湿地帯で飛行時の受信強度とシミュレーションの比較
UAVが飛行した際のAPでの受信電力と、直接波と平面大地からの反射波が干渉する2波モデルで計算した受信電力の比較を図2-3に示す。ここで示すのは、アンテナを地上に対して垂直にした垂直偏波で、飛行高度を30m と50 mにした場合です。2波モデルでの計算には、大地の電気特性も考慮し、さらに実験に使用しているアンテナの構造を基に3次元電磁界シミュレータにてアンテナ単体とUAVにアンテナを装着した場合それぞれのアンテナ利得を基に実施しました。その結果、赤線で示す2波モデルでの受信電力と黒点で示す実験結果の結果は良い一致をいていることが確認できました.
チェーン状マルチホップ無線通信システムについての長距離伝送に関する検討
長距離伝送に関する検討
IM-920は、地上―上空の電波伝搬実験において500 m程度まで通信可能であることを確認しました.ST1~3とAPでのチェーン状マルチホップ通信にて目標として挙げている1.5 kmでの伝送については、UAVを複数飛行させて実験する場所の確保が難しいことから、登別市の海岸沿いの遊歩道が直線状に2 km程度ある場所を用いて実験をおこないました.
実験方法
AP、各ST間の距離は図1-4 (a)に示すようにした。図1-4 (b)は、左からAPの設置風景でAPにはホイップアンテナとともに4素子の八木アンテナを用いました.中央の写真がAPの設置位置からST側を撮影したもので直線状に遊歩道があり、障害物がないことが確認できる。また右端の写真がST1の配置風景で5 mのポール上にST1を配置しています.
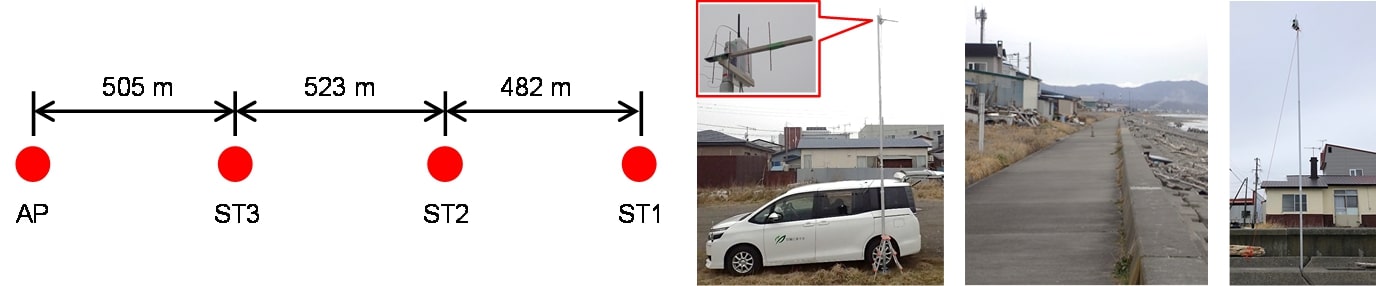
図3-1 1.5 km伝送時の無線局の配置の概略図
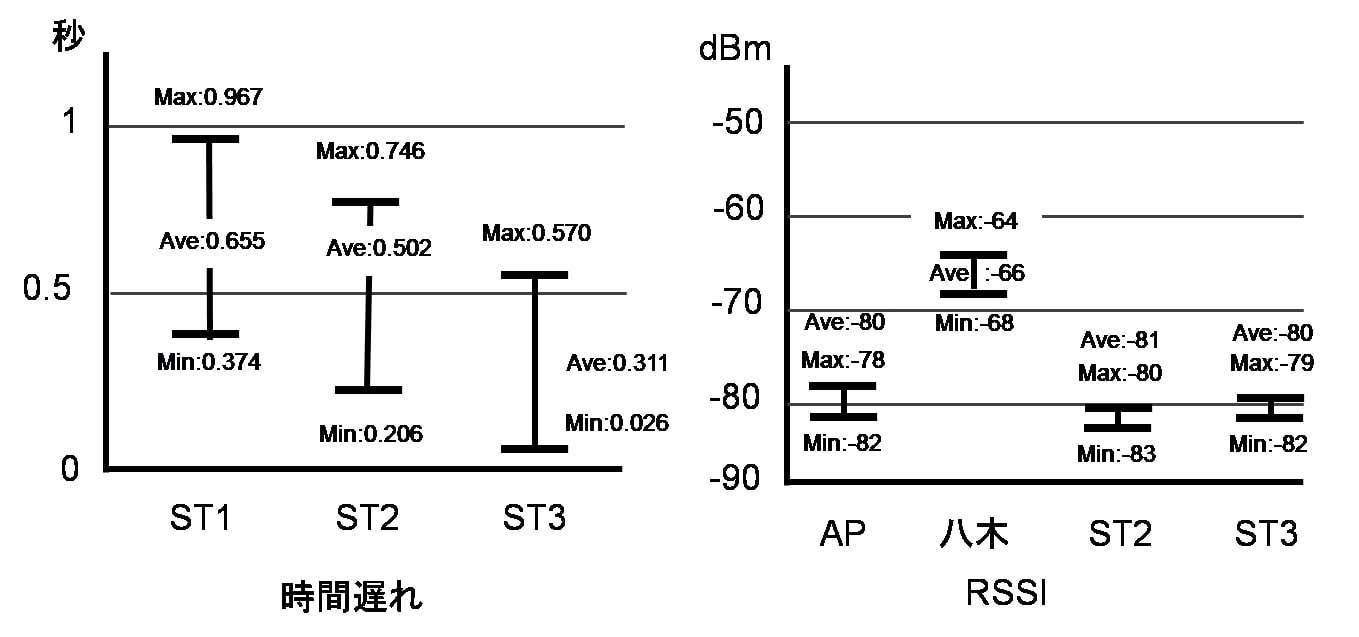
図3-2 1.5㎞伝送時の遅延時間と受信電力
メッシュネットワークの検討
昨年度無線システムとして用いたIM-920に加え、メッシュネットワーク機能を搭載したIM-920Sを用いた伝送に関する検討を実施しました.この機種はルート探索を動的に行うため、チェーン状に比べて無線経路にフレキシビリティがあります。メッシュネットワーク機能の概念図を図4-1に示します.このIM-920Sを使い、実験室内でのメッシュネットワーク機能の確認を実施ししました.フルメッシュモードの場合、通信毎に経路確認を行うため情報の伝送に3秒程度の遅延が生じることが分かりました。そこで時間短縮のため、APからSTへ3秒に1回経路探索を行い、ST側はその経路情報を基に送信するセンドバック機能(図1-6のツリーモードで使用)を用い、図1-7に示すような室内実験を実施しました.その結果、通信時間の短縮ができることが確認できました.表2-1は500回送信した場合のエラー率を示しており、4%程度の通信エラーは生じるものの、経路に変更がなければIM-920でのチェーン方式と同じ160 ms間隔で通信できることを確認しました.
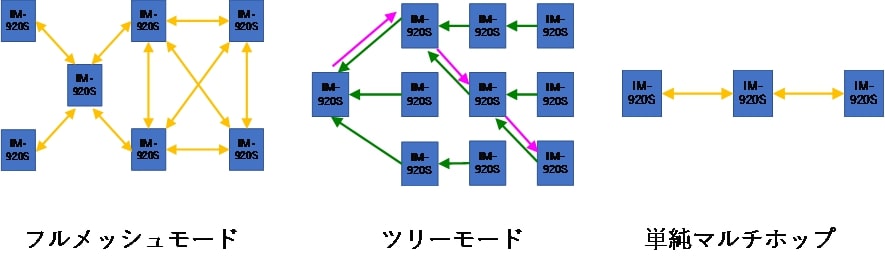
図4-1 IM-920Sでの通信モード
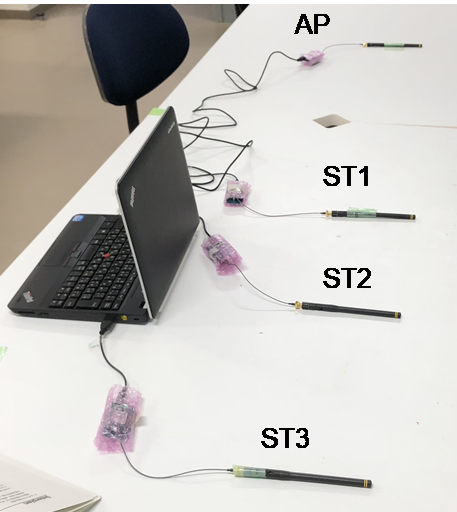
図4-2 IM-920Sでの通信実験風景
追尾アンテナ制御系の研究
雲台について製作を行い、単体性能確認として慣性航法装置及びデータ可変送信デバイスのみよりなる計測機器を移動させ、問題なく動作することを確認した。
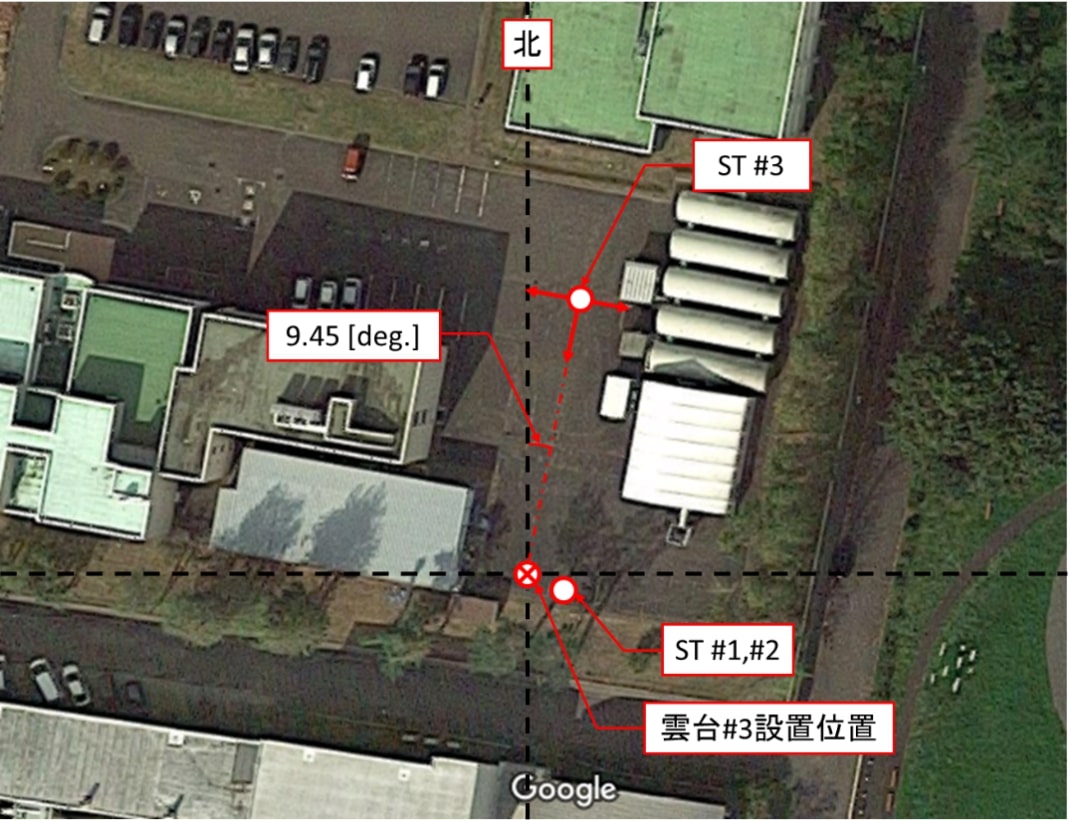
図5-1 実験配置図

実験結果

図5-3 かごに入れたST♯3

図5-4 制作した雲台
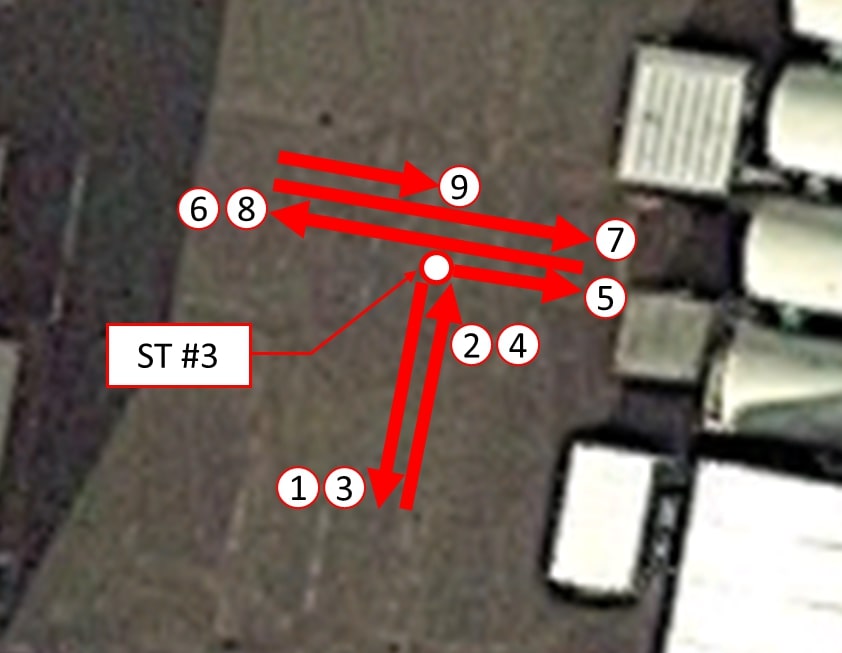
図5-5 ST#3の移動パターン
実験機器設置状況を図5-1に示します。ST♯1、#2は雲台の近くに固定設置、ST#3のみを動かし、それを追尾アンテナにより追尾させます.すなわち、図5-3に示すようにST#3を入れたかごを追尾アンテナの前方に配置し、人力で追尾アンテナに対して左右、前後に移動させました.
図5-5に実際の動かしたST#3の軌跡を示す。追尾アンテナに対して、まず最初に①→②→③→④の順に前後に2回往復したのち、⑤→⑥→⑦→⑧の順に左右に2回往復させました.
かごの中にはST#3が図3-3に示すように配置しました.雲台は、図3-4に示すように、2軸ジンバル部分と、モーター駆動部より構成され、接続されたPCより、角度コマンドを送信します.
総合実証実験
本実験においては、慣性航法装置、データ可変送信デバイス、IM920(無線通信モジュール)からなるUAV搭載用位置情報伝送装置を3セット(#1、#2、#3)用意、そのうち、1セット(#3)のみをUAVとしての模型飛行機に搭載(図6-1)し、当該UAVを追尾する実験を行いました。
実験においては、#2の装置の不具合により、これを使用せず、図4-2、図4-3に示すように#1→#3→追尾アンテナ(雲台、AP)へと位置が伝送される系を構築しました。

図6-1 使用模型飛行機と位置情報伝送装置搭載状況

図6-2 実験場におけるST及びAP配置
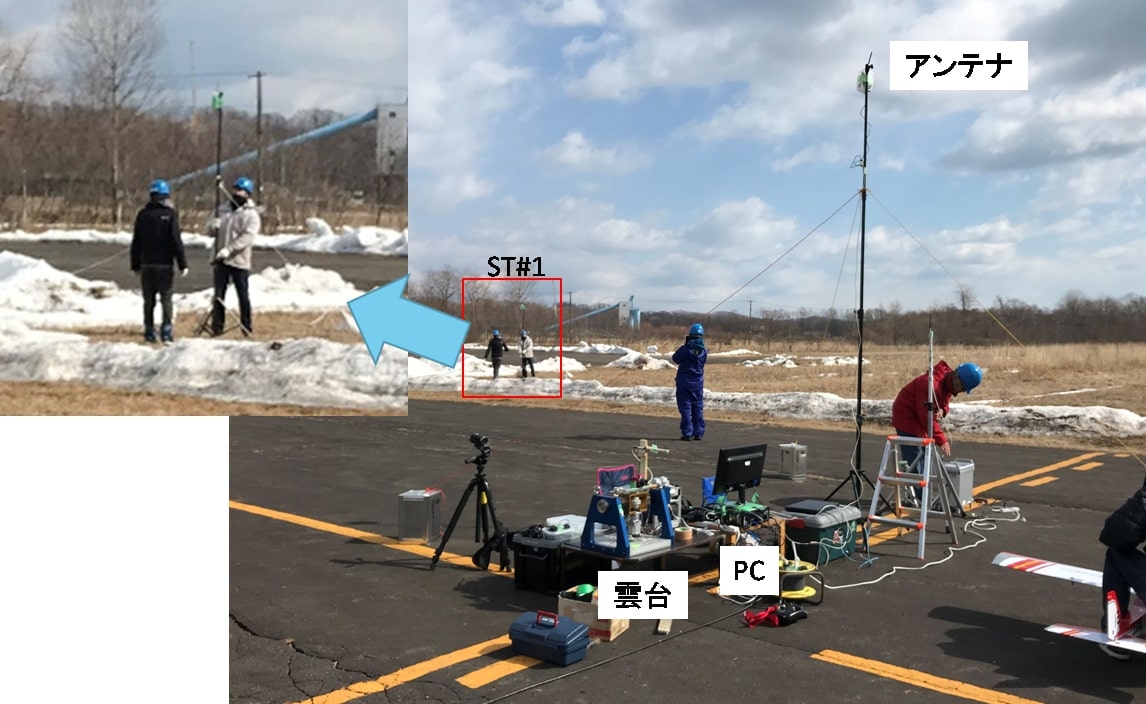
図6-3 実験系設置状況(地上)

図6-4 模型飛行機(ST#3)飛行軌跡
実験においては、地上での確認試験では見られなかった伝送データの欠落が多発ました。このため、UAVの位置が送信されない場合には、最後の送信されたUAVの飛行位置位がそのままコマンドとなるため、大きな角度誤差のずれを発生させる要因の一つとなりました。さらに、位置予測のために使用している角速度が角度からの疑似微分に基づくため、大きな値となってしまっていることも判明しました。地上試験との相違はUAVとして用いた模型飛行機と、その模型飛行機に搭載したアンテナの方向が時々刻々変化が起き、。前者については、模型飛行機に貼られているフィルムの導電性によるアンテナパターンの乱れ、後者については、模型飛行機の姿勢による直接波のブロッキングが考えられます。これを明確にするため、引き続き実験を行い、対策を講じることにしています。
まとめ
上空と地上間での電波伝搬特性を無人航空機(マルチコプター)を飛行させ測定し、シミュレーションとの相違等有益なデータを取得。また、IM920帯を使用した無線通信モジュールでの長距離伝送を行い、1.5㎞での伝送において遅延2秒であることを確認しました。本遅延を考慮したUAVの追尾アンテナシステムにおいては、使用模型飛行機の導電性・姿勢の影響といった課題を明確化するとともに、追尾制御としては指向方向誤差3°程度であることを確認しました。

